W Pionie Naukowo-Badawczym została opracowana teoria obliczeń krzywej ramion statku swobodnie pływającego, dostępna w Technical Report no 71.
Wg tej teorii zmodyfikowany został program WinSEA, używany w PRS do obliczeń stateczności statku. Modyfikacji dokonał autor programu dr Andrzej Laskowski. Użytkownik ma do wyboru trzy opcje obliczeń krzywej ramion: 1) "inżynierską", związaną z osią Ox' lub Ox'', 2) "fizyczną", związaną z osią Oy lub Oy', i 3) "naturalną", związaną z osią Oz', tożsamą z krzywą ramion "minimalnej stateczności". Jest też zerowa opcja "maksimum stateczności", dla statku o stałym przegłębieniu, normalnie niestosowana.
Układ Ox'yz' dotyczy statku przegłębionego; związany jest PS i wodnicą w położeniu wyprostowanym. Układ Ox''y'z' jest układem obróconym względem układu Ox'yz' wokół osi Oz' o kąt azymutu y. Obydwa układy są sztywno związane z jednostką.
Obliczenia wykonane dla statków o kształtach konwencjonalnych pokazują, że wybór osi referencyjnej nie ma znaczenia. Ma natomiast pewne znaczenie dla platform, ze względu na mały stosunek L/B, z czym wiąże się mała różnica między statecznością wzdłużną i poprzeczną. W wypadku platform ze wstępnym przechyłem znaczenie ma burta, na którą przechyla się platforma, gdy jest przechylana w stronę wstępnego przechyłu, krzywa ramion istnieje w całym zakresie przechyłów, Gdy przechylana jest na burtę przeciwną do wstępnego przechyłu, w pewnym sąsiedztwie zera krzywa ramion może być nieokreślona, z powodu braku zrównoważenia wzdłużnego. Wiąże się to z małym stosunkiem L/B, a ściślej – z małym stosunkiem głównych momentów bezwładności wodnicy w położeniu wyprostowanym Jy/Jx. Problemu tego nie ma dla jednostek bez wstępnego przechyłu – krzywe ramion istnieją na obydwie burty.
W przedziale, gdzie krzywa ramion jest nieokreślona jednostka jest niestabilna względem kąta skręcenia, tzn. statek może samoczynnie obrócić się o 180° względem osi z', przyjmując przechył na stronę wstępnego przechyłu, gdzie statek jest stabilny (ma dodatnią wzdłużną wysokość metacentryczną) względem kąta skręcenia. Ta niestabilność względem kąta skręcenia jest niekorzystna dla bezpieczeństwa statku.
Poniżej przedstawiono krzywe ramion dla trzech statków i dwóch platform samopodnośnych.
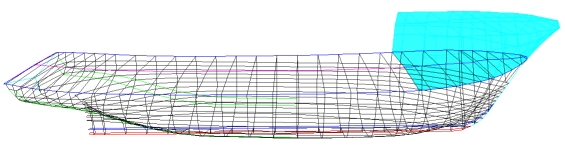 Rys. 1. Badany kuter rybacki
Rys. 1. Badany kuter rybacki
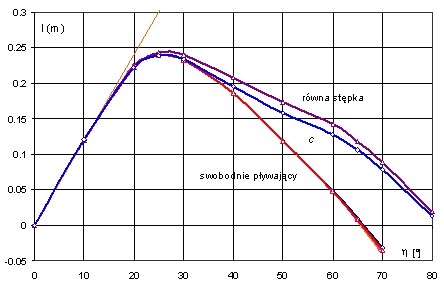
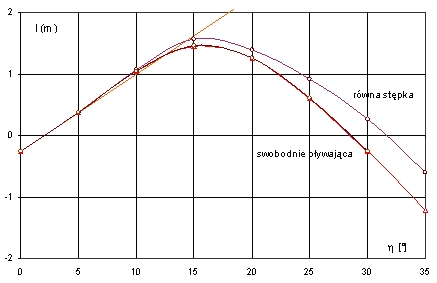
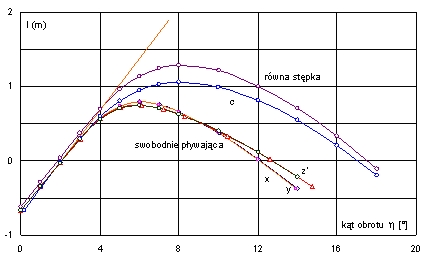
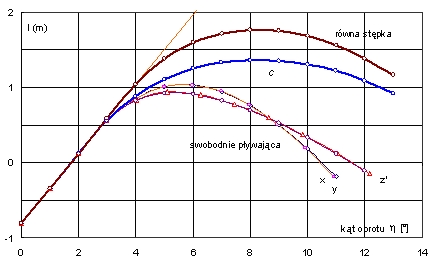
Rys. 2. Krzywe ramion prostujących kutra
Krzywa c na Rys. 2 dotyczy stałego przegłębienia, jakie występuje w położeniu równowagi.
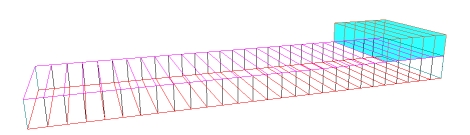 Rys. 3. Barka
Rys. 3. Barka
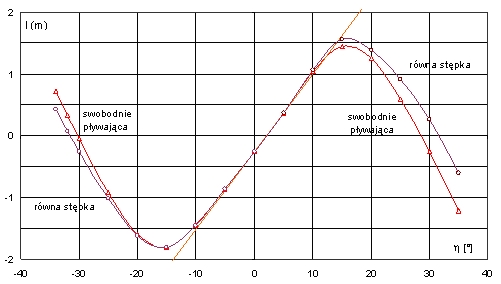
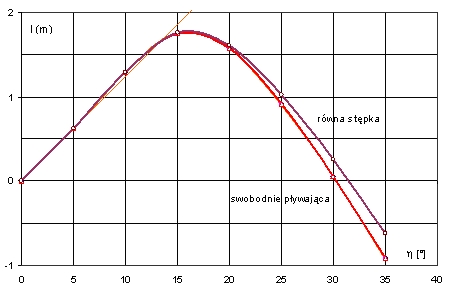 Rys. 4. Krzywe ramion prostujących barki
Rys. 4. Krzywe ramion prostujących barki
Dla jednostek bez wstępnego przechyłu, krzywe ramion są antysymetryczne.
Rys. 5. Barka w stanie uszkodzonym
 Rys. 6. Krzywe ramion prostujących barki w stanie uszkodzonym dla przechyłów na prawą burtę
Rys. 6. Krzywe ramion prostujących barki w stanie uszkodzonym dla przechyłów na prawą burtę
(w stronę wstępnego przechyłu)
Rys. 7. Krzywe ramion barki w stanie uszkodzonym dla przechyłów na obie burty
Dla jednostek ze wstępnym przechyłem, krzywe ramion na obie burty są różne. Na burtę przeciwną do wstępnego przechyłu są większe, przy czym w pewnym sąsiedztwie zera krzywa ramion minimalnej stateczności nie istnieje z braku możliwości wzdłużnego zrównoważenia. W wypadku statków konwencjonalnych, przedział nieciągłości także istnieje, lecz jest niezauważalny, rzędu minut kątowych.
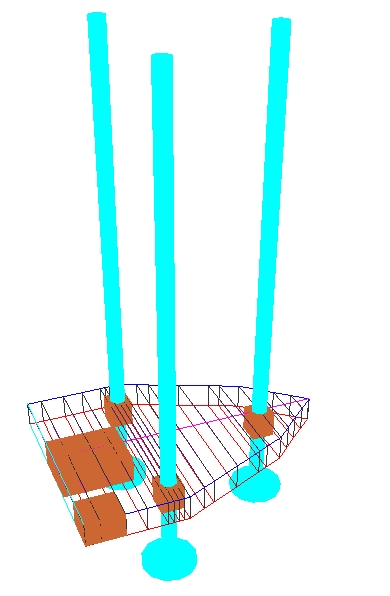 Rys. 8. Platforma I w stanie uszkodzonym, L/B = 1,36, Jy/Jx = 1,73
Rys. 8. Platforma I w stanie uszkodzonym, L/B = 1,36, Jy/Jx = 1,73
Rys. 9. Krzywe ramion platformy I dla przechyłów na prawą burtę (w stronę wstępnego przechyłu)
Krzywa c na Rys. 9 dotyczy stałego przegłębienia, jak w położeniu równowagi.
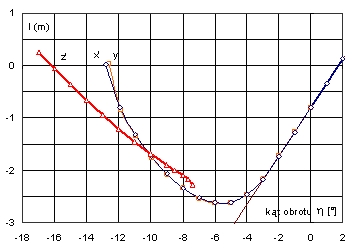
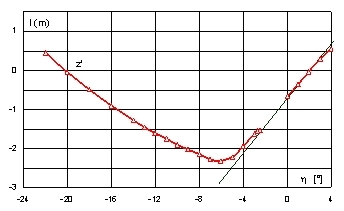 Rys. 10. Krzywa ramion platformy I swobodnie pływającej dla przechyłów na lewą burtę
Rys. 10. Krzywa ramion platformy I swobodnie pływającej dla przechyłów na lewą burtę
Dla przechyłów na lewą burtę, w przedziale a' Î á0, -2,5°ñ krzywa ramion nie istnieje. Poza tym przedziałem, absolutne wartości ramion są większe, co widać lepiej na Rys. 12. Na wykresie zbiorczym (Rys. 12) słabo widać przedział nieciągłości dla krzywej minimalnej stateczności (krzywa z').
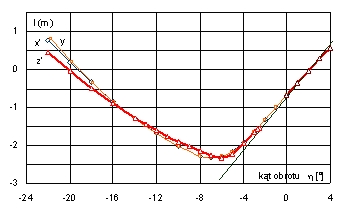
Rys. 11. Krzywe ramion platformy I dla przechyłów na lewą burtę
Zwraca uwagę, że krzywe ramion dla osi referencyjnej x' i y niewiele różnią się od siebie. Tak jest w każdym przypadku, co widać na załączonych wykresach krzywych ramion. Wynika to stąd, że osie obrotu e dla tych krzywych są bardzo zbliżone do siebie. Obie te krzywe niewiele się różnią od krzywej minimalnej stateczności (krzywej z').
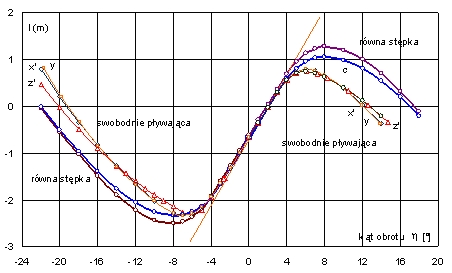
Rys. 12. Krzywe ramion platformy I dla przechyłów na obie burty
Normalnie, dla zadanego kąta przechyłu wzdłużne zrównoważenie statku zachodzi dla czterech kątów skręcenia (czterech azymutów), odpowiadających przechyłom poprzecznym na lewą i prawą burtę oraz przechyłom wzdłużnym (przegłębieniom), na dziób i rufę. Na dwóch pierwszych występują minima ramion dynamicznych, na drugich – maksima.
W przedziale, gdzie krzywa ramion nie istnieje, występują jedynie dwa miejsca zerowe, odpowiadające minimum i maksimum ramienia dynamicznego ld (Rys. 13). Minimum odpowiada przechyłowi na stronę wstępnego przechyłu. Otoczenie maksimum odpowiada przechyłom niestatecznym względem kąta skręcenia. Oznacza to, że statek samoczynnie obróci się wokół osi z’ do azymutu, gdzie występuje minimum ramienia dynamicznego ld. Gdy kąt przechyłu będzie większy od 2,5°, punkt B na Rys. 13 przejdzie na stronę ujemną. Pojawią się więc cztery miejsca zerowe krzywej le, którym będą odpowiadały naprzemiennie minimum i maksimum krzywej ramion dynamicznych ld.
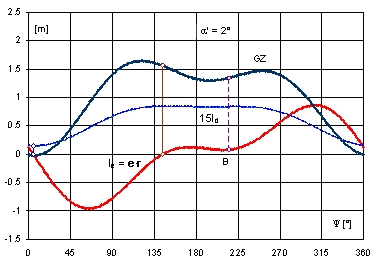
Rys. 13. Przebieg charakterystyk stateczności platformy I w funkcji kąta skręcenia Y dla a' = 2°
Rys. 14. Platforma II w stanie uszkodzonym, L/Bmax = 0,805, Jy/Jx = 1,06
Rys. 15. Krzywe ramion platformy II dla przechyłów na prawą burtę (w stronę wstępnego przechyłu)
Rys. 16. Krzywe ramion platformy II dla przechyłów na lewą burtę

Rys. 17. Krzywe ramion platformy II dla przechyłów na obie burty
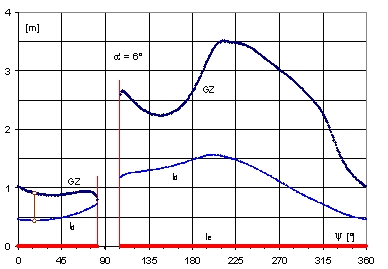
Ze względu na stosunek L/Bmax mniejszy od 1, przedział nieciągłości dla krzywej minimalnej stateczności (krzywa z') dla przechyłów na lewą burtę jest znacznie dłuższy niż w poprzednim wypadku, równy -7,4°, zamiast -2,5°. Inaczej mówiąc, w przedziale a’ Î á0, -7,5°ñ krzywa minimalnej stateczności nie istnieje. Z kolei, dla osi referencyjnych Ox' i Oy krzywe ramion nie istnieją dla kątów poniżej -13° (Rys. 16, Rys. 17). Nie są to jednak krzywe minimalnej stateczności, choć mają to samo pole pomiędzy położeniem równowagi, a zakresem krzywej ramion, co krzywa z'.
Jak poprzednio, w przedziale gdzie krzywa ramion nie istnieje, występują jedynie dwa miejsca zerowe, odpowiadające minimum i maksimum ramienia dynamicznego ld (Rys. 18).
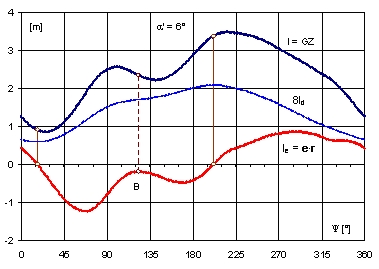
Rys. 18. Przebieg krzywych l, ld i le w funkcji kąta skręcenia Y dla kąta przechyłu a' = 6°
Rys. 19 pokazuje przebieg charakterystyk stateczności dla kąta przechyłu a' = 6° w funkcji azymutu dla osi referencyjnej Ox''. Identyczne charakterystyki występują dla osi referencyjnej Oy'. Widzimy, że różnią się one od przebiegu tych charakterystyk dla osi referencyjnej Oz' (Rys. 18). Tym niemniej, obydwa wskazują na wspólne cechy – dla zadanego kąta przechyłu minimum i maksimum ramion dynamicznych występują przy tym samych kątach skrętu (azymutu).
 Rys. 19. Przebieg ramienia prostującego l º GZ oraz dynamicznego ld platformy II
Rys. 19. Przebieg ramienia prostującego l º GZ oraz dynamicznego ld platformy II
w funkcji azymutu Y, dla przechyłu mniejszego od krytycznego
Z Rys. 19 wynika ponadto, że dla kąta przechyłu a' = 6° platformy nie da się zrównoważyć wzdłużnie, gdy azymut jest z przedziału y Î á86°, 106°ñ.
Z przeprowadzonych obliczeń wynika kilka dalszych wniosków:
a) w początkowym zakresie stateczności wszystkie opcje obliczeniowe, łącznie ze stałym przegłębieniem, są praktycznie tożsame
b) wybór osi referencyjnej nie zmienia kierunku momentu prostującego, ani pola pod krzywą ramion pomiędzy położeniem równowagi a zakresem stateczności, które jest najmniejsze z możliwych. Jest to cecha statku swobodnie pływającego
c) gdy statek ma wstępny przechył, w pewnym sąsiedztwie zera dla przechyłów na przeciwległą burtę, zależnym od stosunku L/B, nie można wyznaczyć krzywej ramion minimalnej stateczności, gdyż nie da się statku wzdłużnie zrównoważyć
d) dla statku swobodnie pływającego znaczenie ma tylko jedna krzywa ramion, dla przechyłów poprzecznych. Dla innych azymutów krzywe ramion mają przedziały nieciągłości
Dla statków konwencjonalnych nie ma więc rewolucji – jakkolwiek nie obliczać krzywych ramion statku swobodnie pływającego, są takie same. Jest natomiast rewolucyjny wniosek dla platform – jest tylko jedna krzywa ramion minimalnej stateczności, związana z osią referencyjną Oz'. Inaczej mówiąc, dla platform swobodnie pływających nie istnieją krzywe ramion dla różnych azymutów, czego wymagają przepisy.